
What types of temperature Controllers are available and How Do They Work?
There are three basic types of controllers: on-off, proportional and PID.
On/Off Control
An on-off controller is the simplest form of temperature control device. The output from the device is either on or off, with no middle state. An on-off control device will switch the output only when the temperature exceeds the set point. For heating control, the output is on when the temperature is below the set point, and off above set point. Since the temperature crosses the set point to change the output state, the process temperature will be cycling continually, going from below set point to above, and back below.
In cases where this cycling occurs rapidly, and to prevent damage to switches or contactors, an on-off differential, or "hysteresis," is added to the controller operations.
This differential requires that the temperature exceed set point by a certain amount before the output will turn off or on again. On-off differential prevents the output from "chattering" or arcing. On-off control is usually used where a precise control is not necessary.
Proportional Control
Proportional temperature controls are designed to eliminate the cycling associated with on-off control. A proportional controller decreases the average power supplied to the heater as the temperature approaches set point. This has the effect of slowing down the heater so that it will not overshoot the set point, but will approach the set point and maintain a stable temperature.
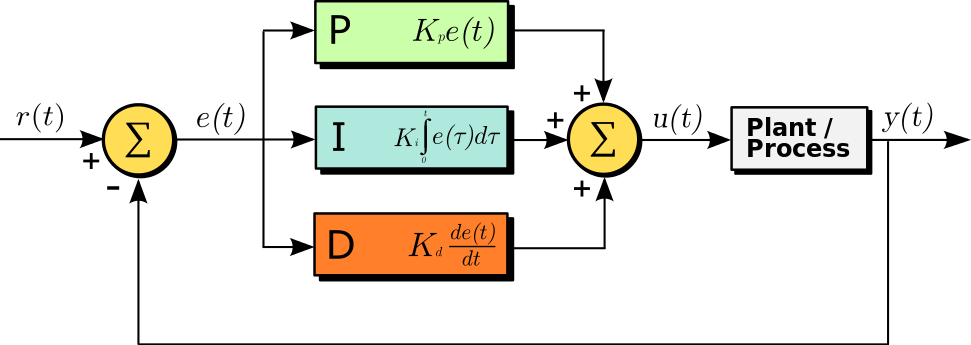
PID temperature Controller
The third controller type provides proportional with integral and derivative control, or PID. This digital temperature controller combines proportional control with two additional adjustments, which helps the unit automatically compensate for changes in the system. These adjustments, integral and derivative, are expressed in time-based units; they are also referred to by their reciprocals, RESET and RATE, respectively. The proportional, integral and derivative terms must be individually adjusted or "tuned" to a particular system using trial and error. It provides the most accurate and stable control of the three controller types, and is best used in systems which have a relatively small mass, those which react quickly to changes in the energy added to the process.